
Det ha nämnts ett antal gånger att bilens sensorer och moduler kommunicerar med varandra via nätverk. Detta för att förenkla kablehärvan i bilen. Istället för att varje pryl har egna elkablar till alla moduler den ska prata med, paratar den med nätverkar som består utav en eller två kablar.
Det finns ett antal typer av nätverk som körs inom en och samma bil. Nätverken kopplas ihop i en special modul för att signalerna från ett nätverk kan komma fram till moduler på ett annat nätverk. Eftersom varje typ av nätverk pratar sitt eget språk, översätter den modulen språket av signalen som kom in till det språket som används i nätverket signalen ska till.
Typer av nätverk:
- Controller Area Network (CAN)
- Local Inter Connect (LIN)
- FlexRay
- …
CAN-bus:
Detta är ett hög hastighets nätverk som består ur två elkablar som är tvinnat ihop, en så kallad twisted pair. Det finns standard färgfer för dessa två kablar, men många avviker från den standarden. Tvinningen gör att kablarna inte behöver avskärning och klarar av inteferens från andra elbkablar ganska bra.
Ett CAN nätverk består utav minst två moduler som är ansluten via twisted pair kablar. I princip borde det vara första och sista modularna på nätverket, men det kan avvika. För att undvika elektrisk resonans av signaler i närverket finns i två av modulerna en 120 ohm motstånd mellan twisted pair kablarna. Ibland väljer man dock att ha de motstånden i kablage istället för i modulerna. Alla extra moduler ansluts helt enkelt i parallell med befirntliga modulerna:
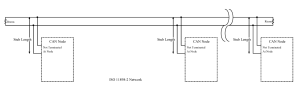 Som framgår ur bilden, ska anslutningar till CAN-nätverket helst vara korta. I bilden framgår även de två 120 ohm motstånden i nätverket – fast de kan även funnas i två av modulerna.
Som framgår ur bilden, ska anslutningar till CAN-nätverket helst vara korta. I bilden framgår även de två 120 ohm motstånden i nätverket – fast de kan även funnas i två av modulerna.
Av de två tvinnade kablarna är det en som heter CAN-high och den andra som heter CAN-low. Detta hara inget med hastigheten att göra, men destomer med hur signalerna ser ut. Enkelt kan man säga att CAN-high har en högre snitt spänning än CAN-low, samt att signalerna är varandras spegelbild.
Ett exempel på en frisk CAN signal:
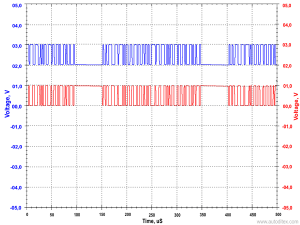 Som det framgår i bilden, är CAN-high signalen mellan 2V och 3V medan CAN-low signalen mellan 1V och 0V.
Som det framgår i bilden, är CAN-high signalen mellan 2V och 3V medan CAN-low signalen mellan 1V och 0V.
Signalen kontrolleras enklast med en scope som ovan, men en volt mätning av CAN-high och CAN-low mot jord kan ge ett intryck om signalerna är hyfsatt ok. Vi återkommer till detta senare under diagnos avsnitten.
En block av signaler som visas i bilden, kallas för ett meddelande. Varje meddelande är utformand på ett standard sätt. Det finns en identifierings del (header), en data del, och en avslutnings del (footer):

Identifierings delen ser till att meddelandet går till rätt modul. Avslutnings delen behövs för att mottagaren kan fastställa om signalen var komplett och korrekt. Själva data delen är bara en liten del av meddelandet.
Eftersom nätverket har relativ hög hastighet, används det för saker som behöver snabb kommunikation mellan de olike komponenten. Saker som avser motor management och säkerhets komponenter brukar vara CAN-high, samma gäller för ABS broms systemen. Men är det radion eller AC då behövs det inte någon större hastighet – dessa kan köras på CAN nätverket men ofta använder ett annat långsamare nätverk.
LIN-bus:
Ett LIN nätverk har bara en kabel för att förmedla nätverks signaler. Hastigheten i ett LIN nätverk är mycket lägre än i ett CAN nätverk. Detta går LIN lämpligt för komponenten där hastighet spelar en mindre roll. System som Infotainment, dörr elektronik, och värme, ventilation, och AC (HVAC) fungerar fint med lägre hastigheter.
Genom att bara en kabel behövs, är LIN nätverk billigare att bygga och enklare att hantera än CAN nätverk. Olika moduler ansluts helt enkelt till den LINA kabeln som går från modul till modul.
Olika former av nätverk pratar inte samma språk, så de kan inte direkt anslutas till varandra. Så är även fallet med CAN och LIN. Om nätverken ska kopplas för att skicka meddelanden mellan moduler i olika nätverk, behövs en översättare som kallas en Gateway. Denna Gateway klarar av översättning av båda språken i båda riktningar.
Liksom CAN meddelanden har även LIN meddelanden een header, data och footer. Dock är LIN varianten av enklare slag än vad CAN meddelanden har.
FlexRay:
Vet ej vart och hur dessa används än men kompletterar när jag vet mer.
Paul
2025-09
Sweden
Denna sida är del av en serie. Du hitta huvud sidan för denna serie här.